

Якщо повернути кермо до упору, вийти з машини і подивитися на неї спереду, можна помітити, що колеса повернені під різними кутами: одне вивернуте сильніше, ніж інше. Але це не несправність, а навпаки, точний інженерний розрахунок, який в цьому році святкує свій ювілей – йому виповнюється рівно 200 років. Чому рульове управління так спроектовано, і чому не можна було б зробити інакше?
Навіщо колеса повертаються на різний кут?
Відповідь на це питання лежить на поверхні: уявіть собі, що автомобіль рухається по колу за годинниковою стрілкою – в цьому випадку коло, по якому буде рухатися переднє праве колесо, буде менше, ніж окружність, описувана лівим. Відповідно, при постійній швидкості автомобіля колеса на одній осі будуть обертатися з різною швидкістю. Якби колеса були повернені на однаковий кут, то внутрішнє колесо, прагнучи рухатися так само, як зовнішнє, постійно проскакувало б і викликало прослизання зовнішнього – при цьому поведінка автомобіля в повороті була б непередбачуваною, а знос шин – катастрофічним. Наочно це можна бачити на багатовісних візках вантажівок і причепів: колеса в повороті рухаються з проковзуванням, і шини зношуються швидко і нерівномірно. Відповідно, для вирішення цих проблем і забезпечення правильного руху керованих коліс по їх траєкторії вони і повертаються на різні кути.
Як розрахована геометрія руху коліс?
Сама проблема прослизання внутрішнього колеса в повороті була актуальна задовго до масового поширення автомобілів – адже ті ж проблеми були і у кінних возів. Власне, саме на кінному возі рульове управління вдосконалили і остаточно вирішили цю проблему: в 1817 році його винайшов Георг Ланкеншпергер, а в 1918 році запатентував в Англії його агент Рудольф Аккерман. З тих пір принцип повороту керуючих коліс на різні кути в повороті так і називається – принцип Аккермана.
Щоб забезпечити потрібні кути повороту коліс, геометрія рульової трапеції розраховується за єдиною умовною схемою. У ній поперечна рульова тяга коротше керуючої осі і зміщена за неї, а поворотні кермові важелі лежать на лінії між віссю повороту передніх коліс і центром задньої осі автомобіля. Для того, щоб простіше було зрозуміти це складне на перший погляд пояснення, досить поглянути на просту схему нижче.
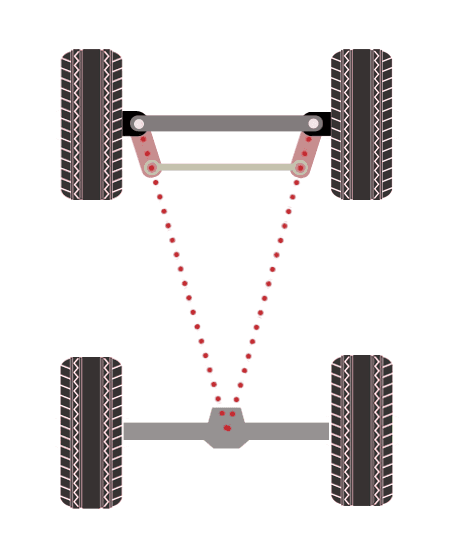
Відповідно, при повороті коліс в такій схемі вони виявляються повернені на різні кути – внутрішнє повертається більше, а зовнішнє менше. При цьому центри кіл, по яких рухаються колеса, збігаються, а радіус кола для зовнішнього колеса – це фактично радіус розвороту автомобіля «від бордюру до бордюру» з поправкою на ширину шини.
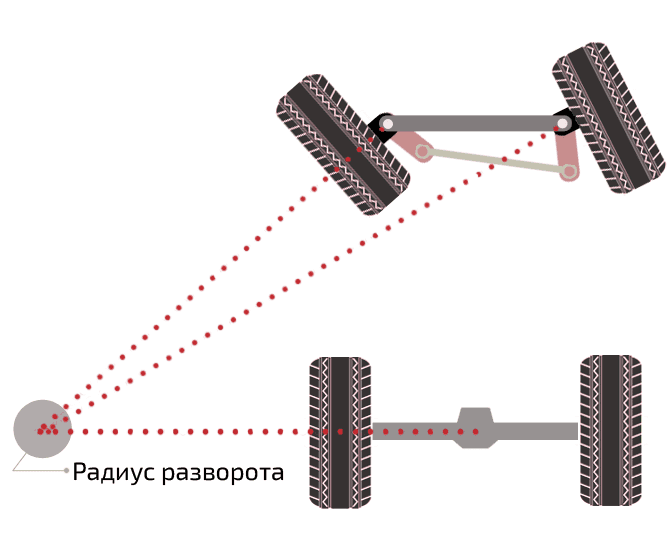
Варто відзначити, що зображення вище – схематичне, і рульове управління автомобіля, зрозуміло, складніше, ніж те, що зображено на схемі. Однак загальна геометрія справедлива для всіх автомобілів.
В автоспорті підхід може змінюватися: наприклад, на деяких гоночних автомобілях ситуація з кутами повороту коліс може бути навіть зворотна для компенсації бічного відведення колеса в швидкісних поворотах, а в дріфті передні колеса намагаються зробити паралельними навіть в поворотах, щоб знизити знос передніх шин при постійному русі в керованому заносі. Але це – крайнощі, які не актуальні для звичайних серійних машин.
До речі, на початку ми не дарма згадали не лише різні шляхи, які проходять в повороті колеса, але і різні швидкості їх обертання. Для того, щоб забезпечити можливість обертання коліс на одній осі з різними швидкостями, як ми вже розповідали, потрібен диференціал.







